The main advantages of this engine is it only weighs 12 grams, but it's a small size servo with metal gears.
SKU: WUM522065777131 |
OverviewThe main advantages of this engine is it only weighs 12 grams, but it's a small size servo with metal gears. Actuators are used in a wide variety of applications where accuracy is required. This type of actuator is very common, small, and you can use the finesse applications, where you need precision or remote-controlled toy carts to move the front wheels in curves .. An advantage over stepper motors is the fact that when they are empty, servo motors does not consume, nor can keep shaft blocked. Specifications
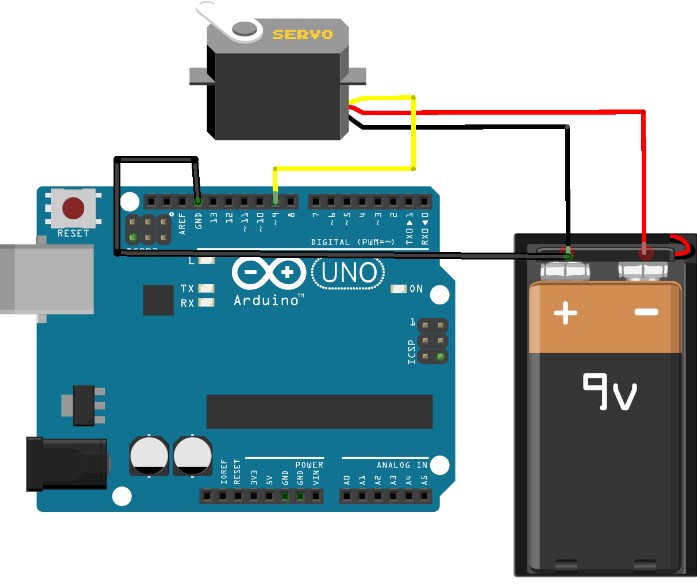
Use with ArduinoIf the actuator is driven to be positioned at an angle, but because of inertia will rotate a little longer than desired, the control circuit inside the actuator will refer to the potentiometer to check this matter. The potentiometer measures its position and the control circuit will quickly correct the error. Also, if we try to change forcibly (mechanically) at actuator position has been set, it will resist. This makes it ideal for servo applications where precise control is needed, such as robotic arms. There are three wires connection: GND, 5V and a line for command, which we will connect to an Arduino pin PWM plate. It is not recommended to directly supply the board Arduino in the case of DC motors. If we're going to use a 9 V battery, negative battery cable must be connected to GND in the board. Most times, actuator terminals will comply with the code shown below (yellow - control, black - GND, red). To check this and other parameters to see your engine features, you can see the data sheet provided by the manufacturer. In it you will find other information, such as rotational speed, torque and power supply recommended.
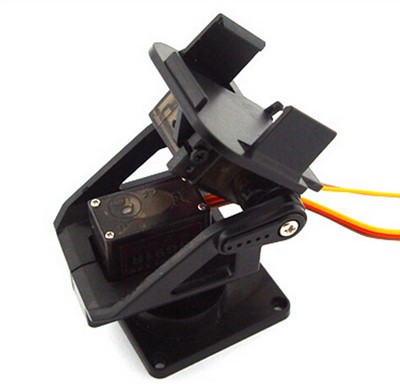
Perhaps the biggest advantage of the Arduino open-source community is to, with numerous examples and libraries. Use Servo.h library for control actuator. It allows us to declare up to 8 objects of type Servo and use functions associated with these items as attach (pin) to indicate the object to which pin communicate or write (position) to directly control the position servo (on pin indicated attach method () will generate a PWM control actuator). So an object is an instance of programming languages (variable of some type) can have data and functions (methods) specific. Using a mechanical kit for 2-axis positioning (see picture below) and two actuators, you could easily build a robotic arm. You can use a joystick to control.
Two-axis positioning system
|
Open Impulse
Arduino, Electronic modules and Robotics